 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniVerse: A Unified Modulation Framework for Segmentation-Free,Disentangled Multi-Concept Personalization
May 29, 2026Personalized visual understanding has advanced significantly, yet existing approaches struggle to localize and extract specific concepts when input images contain multiple objects. Many prior methods rely heavily on segmentation-based supervision or exhibit poor compositional generalization, limiting their ability to accurately disentangle and manipulate individual concepts. In this work, we propose UniVerse, a Unified Modulation Framework for segmentation-free, disentangled multi-concept personalization in diffusion transformers. Our method allows for composable and decomposable concept extraction, enabling fine-grained localization and representation of target objects without explicit segmentation masks. UniVerse learns to decompose complex scenes into concept-specific representations and then compose them in a unified manner, enabling robust personalization across diverse visual contexts. Through extensive experiments on multiple benchmarks, we demonstrate that UniVerse significantly outperforms state-of-the-art baselines in both localization accuracy and visual fidelity. Qualitative and quantitative results show that our approach can precisely extract target concepts in cluttered scenes, paving the way for more flexible, interpretable, and personalized visual generation and understanding.
DynaFLIP: Rethinking Robotics Perception via Tri-Modal-Dynamics Guided Representation
May 28, 2026Robot manipulation critically depends on perception that preserves the action-relevant aspects of a scene. Yet most robot learning pipelines are built upon visual encoders pre-trained for static recognition or vision-language alignment, leaving motion understanding to downstream policies. We introduce DynaFLIP, a dynamics-aware multimodal pre-training framework that pushes motion understanding upstream into perception. We construct image-language-3D flow triplets from heterogeneous human and robot videos, and use these triplets as training-time supervision to shape an image-only encoder. Our key idea is to encourage the three modalities to span a small simplex volume in the shared hyperspherical space -- a smaller simplex volume indicating stronger alignment. To avoid the geometric ambiguity and trivial collapse of naive volume minimization, we combine simplex-volume minimization with a cosine regularizer and a contrastive objective. Our analyses show that DynaFLIP focuses on control-relevant regions critical for manipulation. The resulting dynamics-aware representations serve as reusable visual backbones and consistently outperform baselines across diverse downstream policies, including VLAs. We validate this across diverse simulation and real-world setups, with gains reaching +22.5% under out-of-distribution scenarios. Our results suggest that robot generalization improves when visual representations are trained to encode not just what is present, but how the world changes under action.
TRACE: Object Motion Editing in Videos with First-Frame Trajectory Guidance
Mar 26, 2026We study object motion path editing in videos, where the goal is to alter a target object's trajectory while preserving the original scene content. Unlike prior video editing methods that primarily manipulate appearance or rely on point-track-based trajectory control, which is often challenging for users to provide during inference, especially in videos with camera motion, we offer a practical, easy-to-use approach to controllable object-centric motion editing. We present Trace, a framework that enables users to design the desired trajectory in a single anchor frame and then synthesizes a temporally consistent edited video. Our approach addresses this task with a two-stage pipeline: a cross-view motion transformation module that maps first-frame path design to frame-aligned box trajectories under camera motion, and a motion-conditioned video re-synthesis module that follows these trajectories to regenerate the object while preserving the remaining content of the input video. Experiments on diverse real-world videos show that our method produces more coherent, realistic, and controllable motion edits than recent image-to-video and video-to-video methods.
Generative Refocusing: Flexible Defocus Control from a Single Image
Dec 18, 2025



Depth-of-field control is essential in photography, but getting the perfect focus often takes several tries or special equipment. Single-image refocusing is still difficult. It involves recovering sharp content and creating realistic bokeh. Current methods have significant drawbacks. They need all-in-focus inputs, depend on synthetic data from simulators, and have limited control over aperture. We introduce Generative Refocusing, a two-step process that uses DeblurNet to recover all-in-focus images from various inputs and BokehNet for creating controllable bokeh. Our main innovation is semi-supervised training. This method combines synthetic paired data with unpaired real bokeh images, using EXIF metadata to capture real optical characteristics beyond what simulators can provide. Our experiments show we achieve top performance in defocus deblurring, bokeh synthesis, and refocusing benchmarks. Additionally, our Generative Refocusing allows text-guided adjustments and custom aperture shapes.
Coupled Diffusion Sampling for Training-Free Multi-View Image Editing
Oct 16, 2025We present an inference-time diffusion sampling method to perform multi-view consistent image editing using pre-trained 2D image editing models. These models can independently produce high-quality edits for each image in a set of multi-view images of a 3D scene or object, but they do not maintain consistency across views. Existing approaches typically address this by optimizing over explicit 3D representations, but they suffer from a lengthy optimization process and instability under sparse view settings. We propose an implicit 3D regularization approach by constraining the generated 2D image sequences to adhere to a pre-trained multi-view image distribution. This is achieved through coupled diffusion sampling, a simple diffusion sampling technique that concurrently samples two trajectories from both a multi-view image distribution and a 2D edited image distribution, using a coupling term to enforce the multi-view consistency among the generated images. We validate the effectiveness and generality of this framework on three distinct multi-view image editing tasks, demonstrating its applicability across various model architectures and highlighting its potential as a general solution for multi-view consistent editing.
Bridging Diffusion Models and 3D Representations: A 3D Consistent Super-Resolution Framework
Aug 06, 2025We propose 3D Super Resolution (3DSR), a novel 3D Gaussian-splatting-based super-resolution framework that leverages off-the-shelf diffusion-based 2D super-resolution models. 3DSR encourages 3D consistency across views via the use of an explicit 3D Gaussian-splatting-based scene representation. This makes the proposed 3DSR different from prior work, such as image upsampling or the use of video super-resolution, which either don't consider 3D consistency or aim to incorporate 3D consistency implicitly. Notably, our method enhances visual quality without additional fine-tuning, ensuring spatial coherence within the reconstructed scene. We evaluate 3DSR on MipNeRF360 and LLFF data, demonstrating that it produces high-resolution results that are visually compelling, while maintaining structural consistency in 3D reconstructions. Code will be released.
Imagine, Verify, Execute: Memory-Guided Agentic Exploration with Vision-Language Models
May 12, 2025
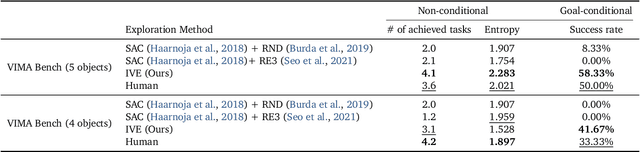


Exploration is essential for general-purpose robotic learning, especially in open-ended environments where dense rewards, explicit goals, or task-specific supervision are scarce. Vision-language models (VLMs), with their semantic reasoning over objects, spatial relations, and potential outcomes, present a compelling foundation for generating high-level exploratory behaviors. However, their outputs are often ungrounded, making it difficult to determine whether imagined transitions are physically feasible or informative. To bridge the gap between imagination and execution, we present IVE (Imagine, Verify, Execute), an agentic exploration framework inspired by human curiosity. Human exploration is often driven by the desire to discover novel scene configurations and to deepen understanding of the environment. Similarly, IVE leverages VLMs to abstract RGB-D observations into semantic scene graphs, imagine novel scenes, predict their physical plausibility, and generate executable skill sequences through action tools. We evaluate IVE in both simulated and real-world tabletop environments. The results show that IVE enables more diverse and meaningful exploration than RL baselines, as evidenced by a 4.1 to 7.8x increase in the entropy of visited states. Moreover, the collected experience supports downstream learning, producing policies that closely match or exceed the performance of those trained on human-collected demonstrations.
LIRM: Large Inverse Rendering Model for Progressive Reconstruction of Shape, Materials and View-dependent Radiance Fields
Apr 28, 2025We present Large Inverse Rendering Model (LIRM), a transformer architecture that jointly reconstructs high-quality shape, materials, and radiance fields with view-dependent effects in less than a second. Our model builds upon the recent Large Reconstruction Models (LRMs) that achieve state-of-the-art sparse-view reconstruction quality. However, existing LRMs struggle to reconstruct unseen parts accurately and cannot recover glossy appearance or generate relightable 3D contents that can be consumed by standard Graphics engines. To address these limitations, we make three key technical contributions to build a more practical multi-view 3D reconstruction framework. First, we introduce an update model that allows us to progressively add more input views to improve our reconstruction. Second, we propose a hexa-plane neural SDF representation to better recover detailed textures, geometry and material parameters. Third, we develop a novel neural directional-embedding mechanism to handle view-dependent effects. Trained on a large-scale shape and material dataset with a tailored coarse-to-fine training scheme, our model achieves compelling results. It compares favorably to optimization-based dense-view inverse rendering methods in terms of geometry and relighting accuracy, while requiring only a fraction of the inference time.
CineVerse: Consistent Keyframe Synthesis for Cinematic Scene Composition
Apr 28, 2025We present CineVerse, a novel framework for the task of cinematic scene composition. Similar to traditional multi-shot generation, our task emphasizes the need for consistency and continuity across frames. However, our task also focuses on addressing challenges inherent to filmmaking, such as multiple characters, complex interactions, and visual cinematic effects. In order to learn to generate such content, we first create the CineVerse dataset. We use this dataset to train our proposed two-stage approach. First, we prompt a large language model (LLM) with task-specific instructions to take in a high-level scene description and generate a detailed plan for the overall setting and characters, as well as the individual shots. Then, we fine-tune a text-to-image generation model to synthesize high-quality visual keyframes. Experimental results demonstrate that CineVerse yields promising improvements in generating visually coherent and contextually rich movie scenes, paving the way for further exploration in cinematic video synthesis.
Shape My Moves: Text-Driven Shape-Aware Synthesis of Human Motions
Apr 04, 2025



We explore how body shapes influence human motion synthesis, an aspect often overlooked in existing text-to-motion generation methods due to the ease of learning a homogenized, canonical body shape. However, this homogenization can distort the natural correlations between different body shapes and their motion dynamics. Our method addresses this gap by generating body-shape-aware human motions from natural language prompts. We utilize a finite scalar quantization-based variational autoencoder (FSQ-VAE) to quantize motion into discrete tokens and then leverage continuous body shape information to de-quantize these tokens back into continuous, detailed motion. Additionally, we harness the capabilities of a pretrained language model to predict both continuous shape parameters and motion tokens, facilitating the synthesis of text-aligned motions and decoding them into shape-aware motions. We evaluate our method quantitatively and qualitatively, and also conduct a comprehensive perceptual study to demonstrate its efficacy in generating shape-aware motions.